Objective
To design and implement a robust deep learning framework for 3D dynamic scene reconstruction, leveraging multi-view camera systems, to model complex human interactions in densely populated environments.
Dataset
UFC Dataset
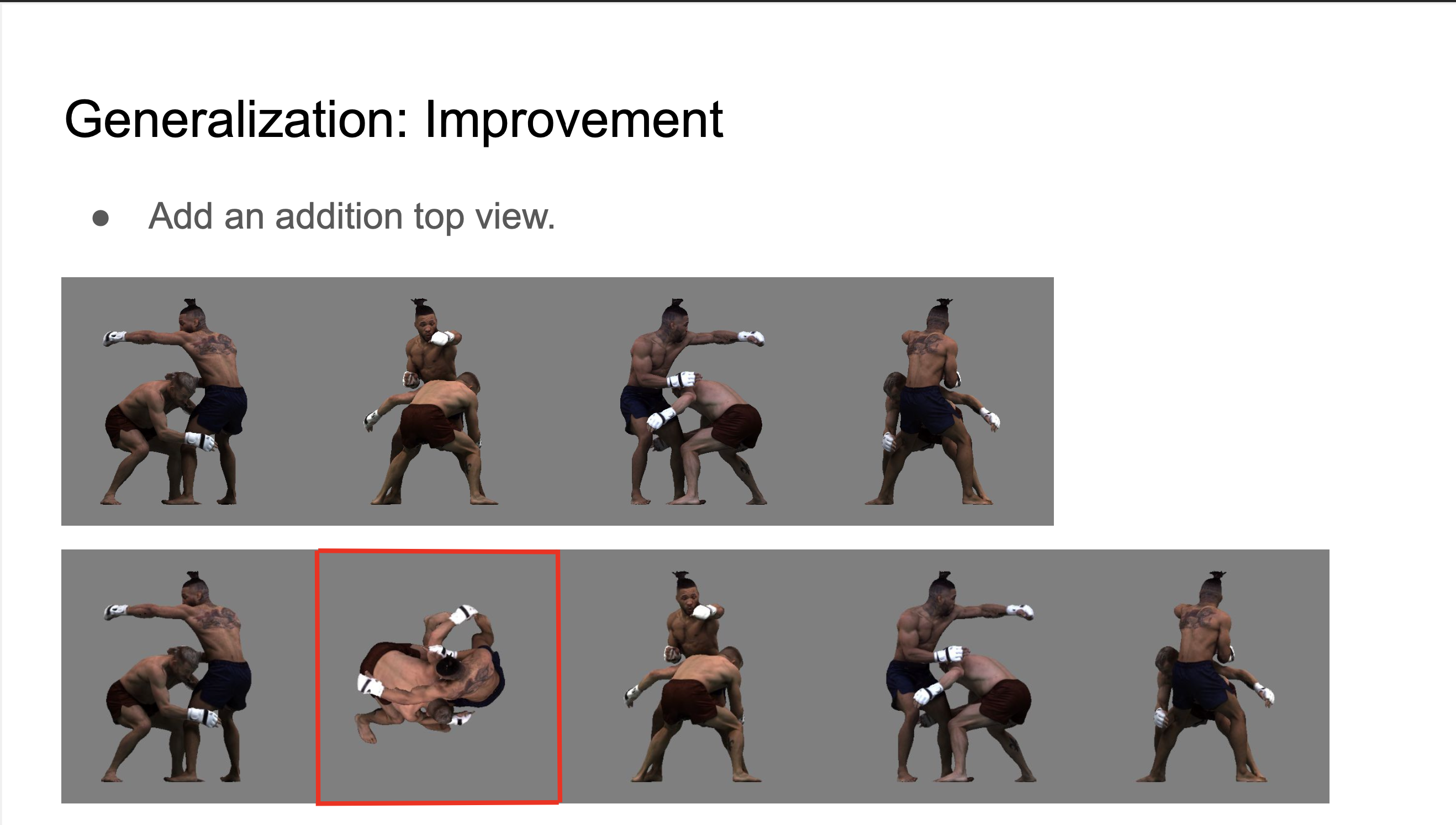
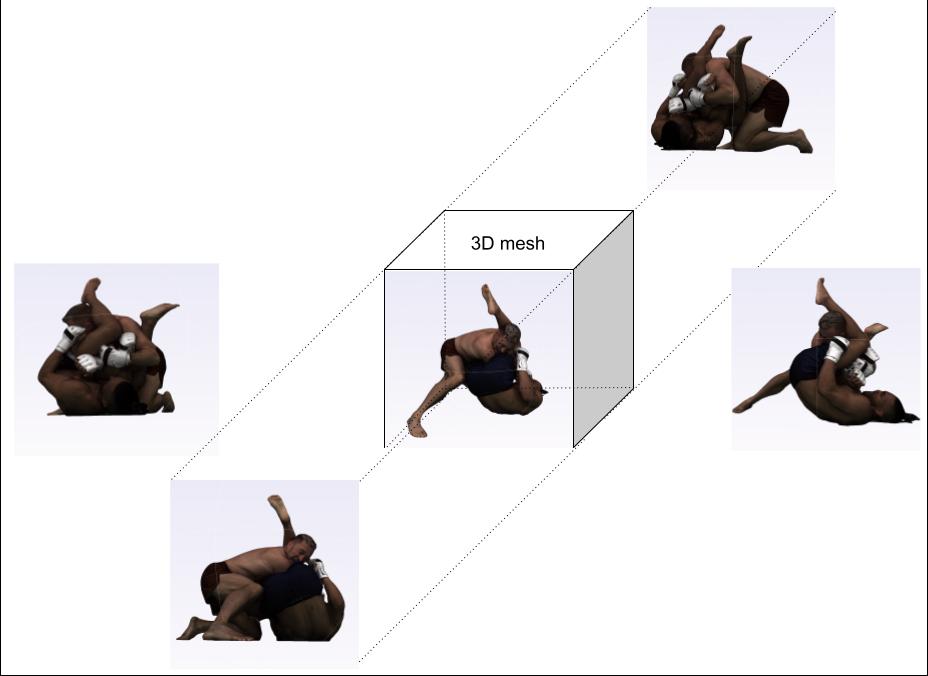
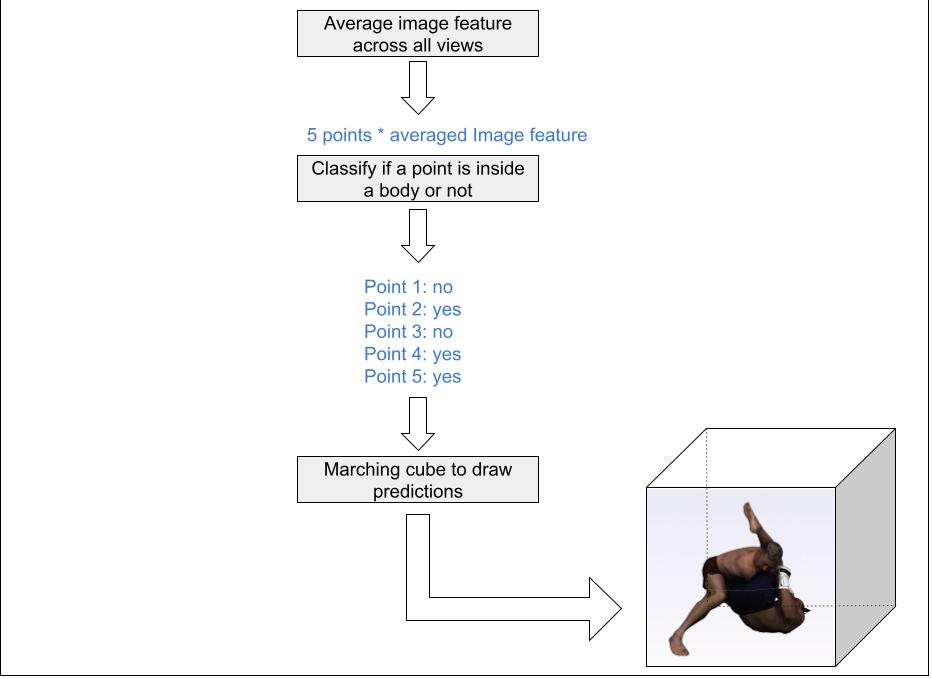
Result Demonstration

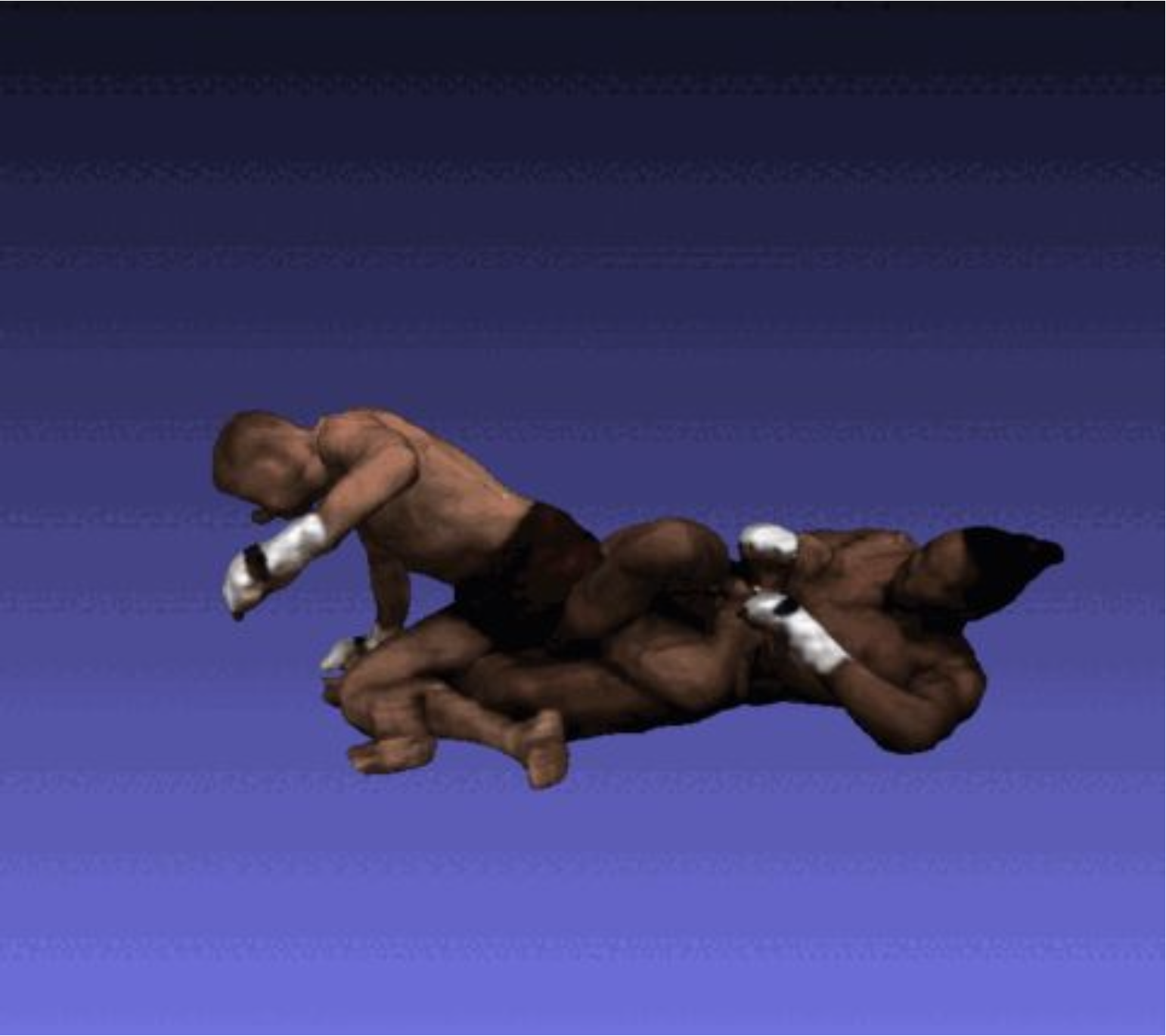
Prediction on a unseen scene
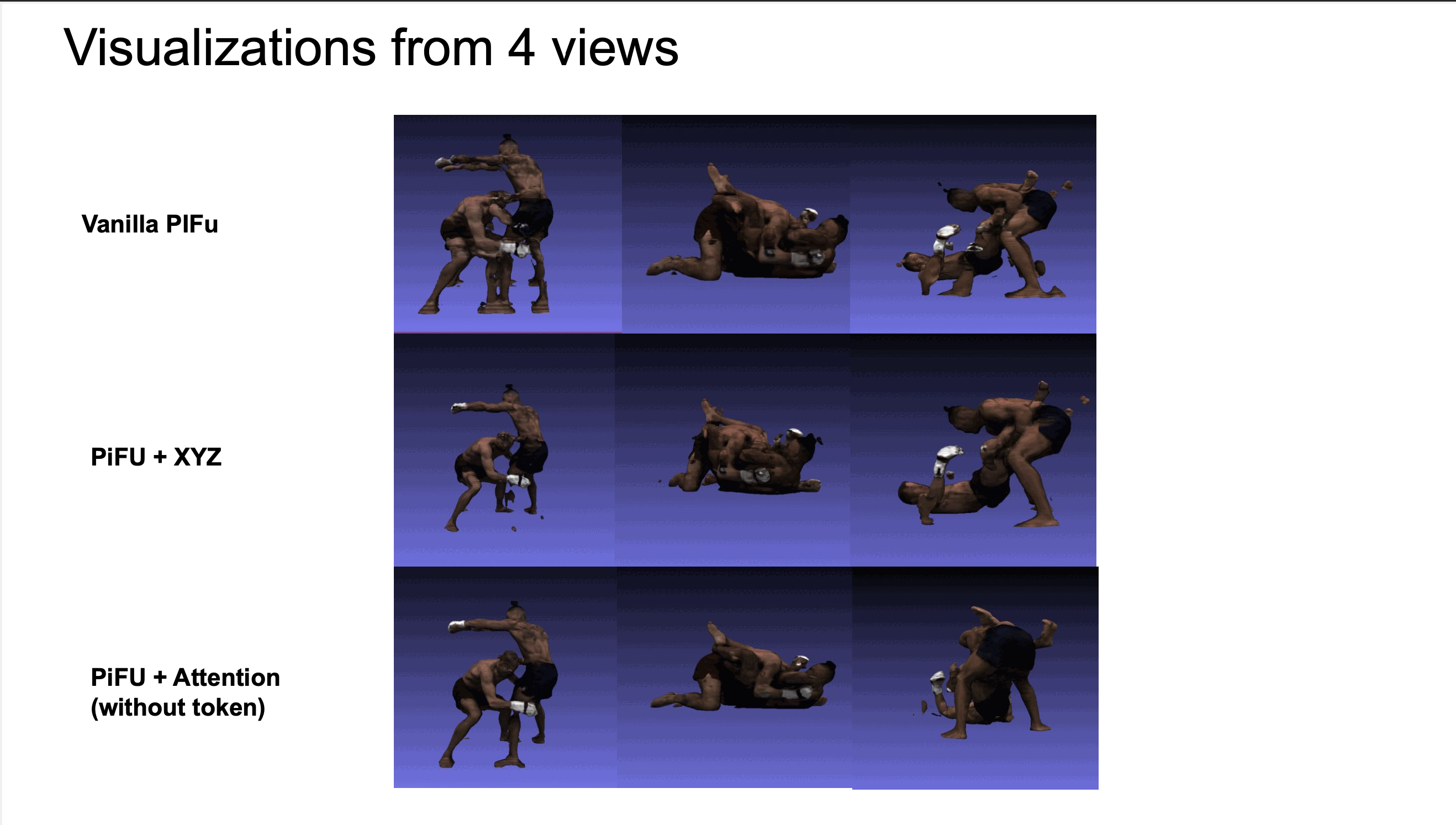
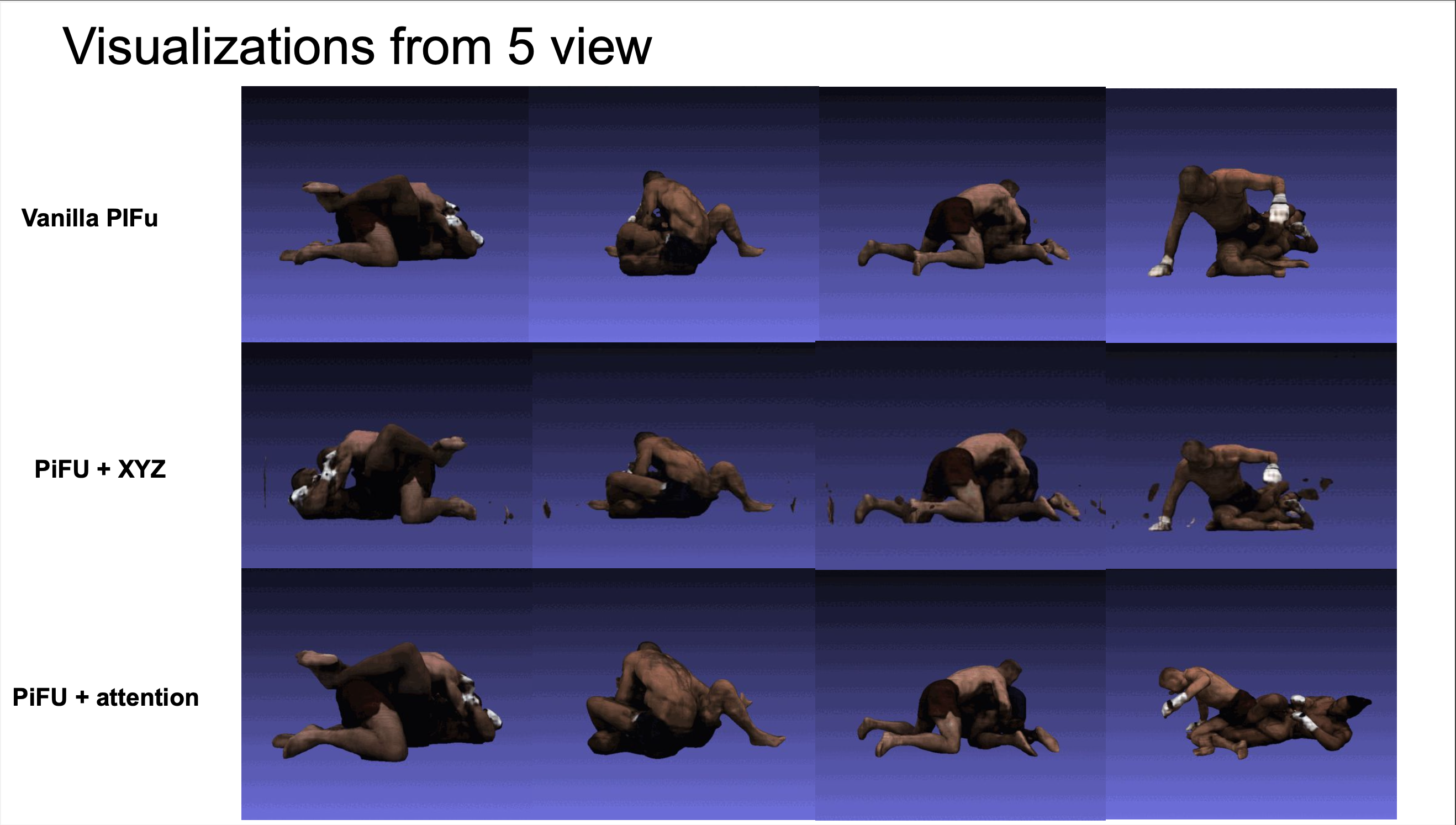
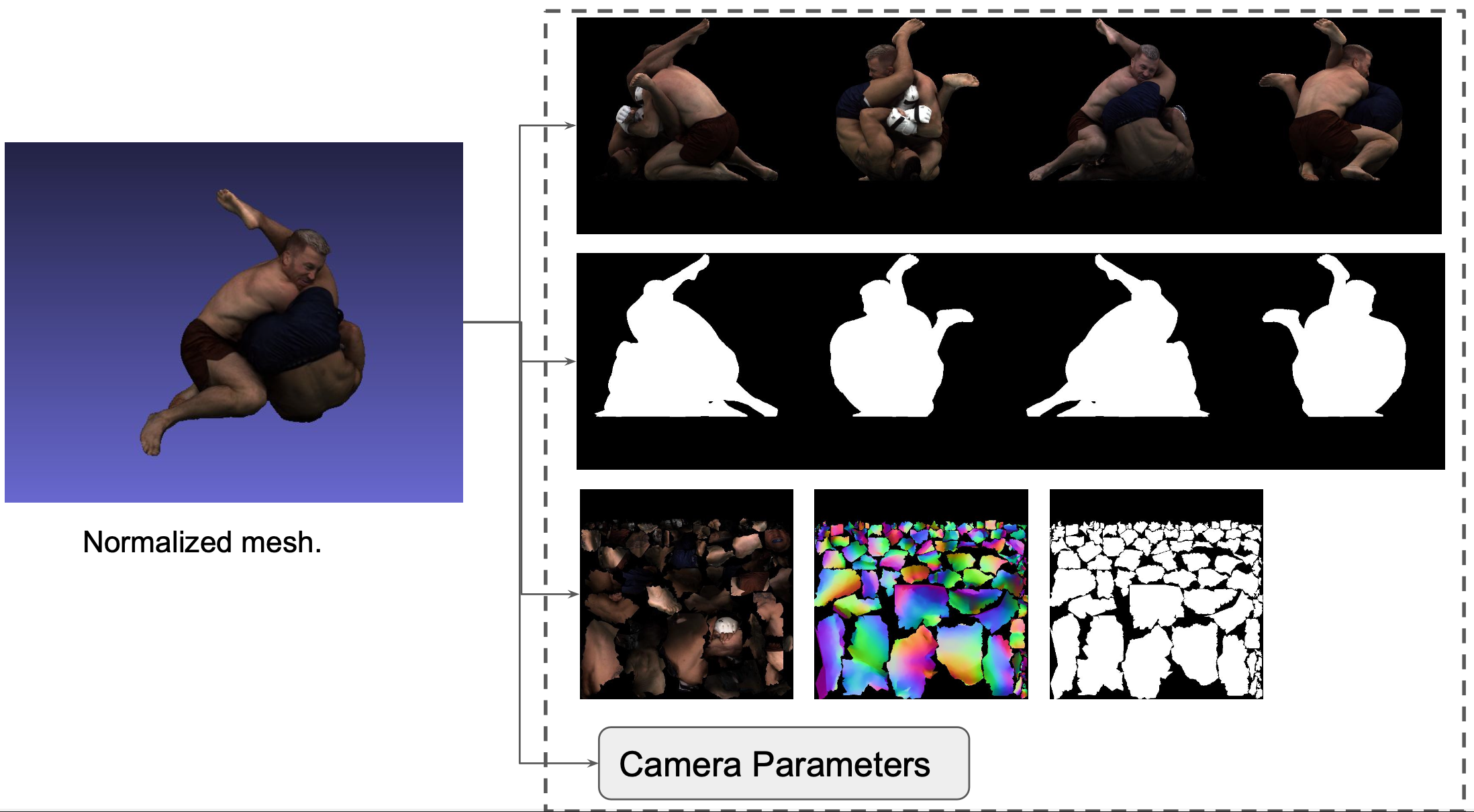
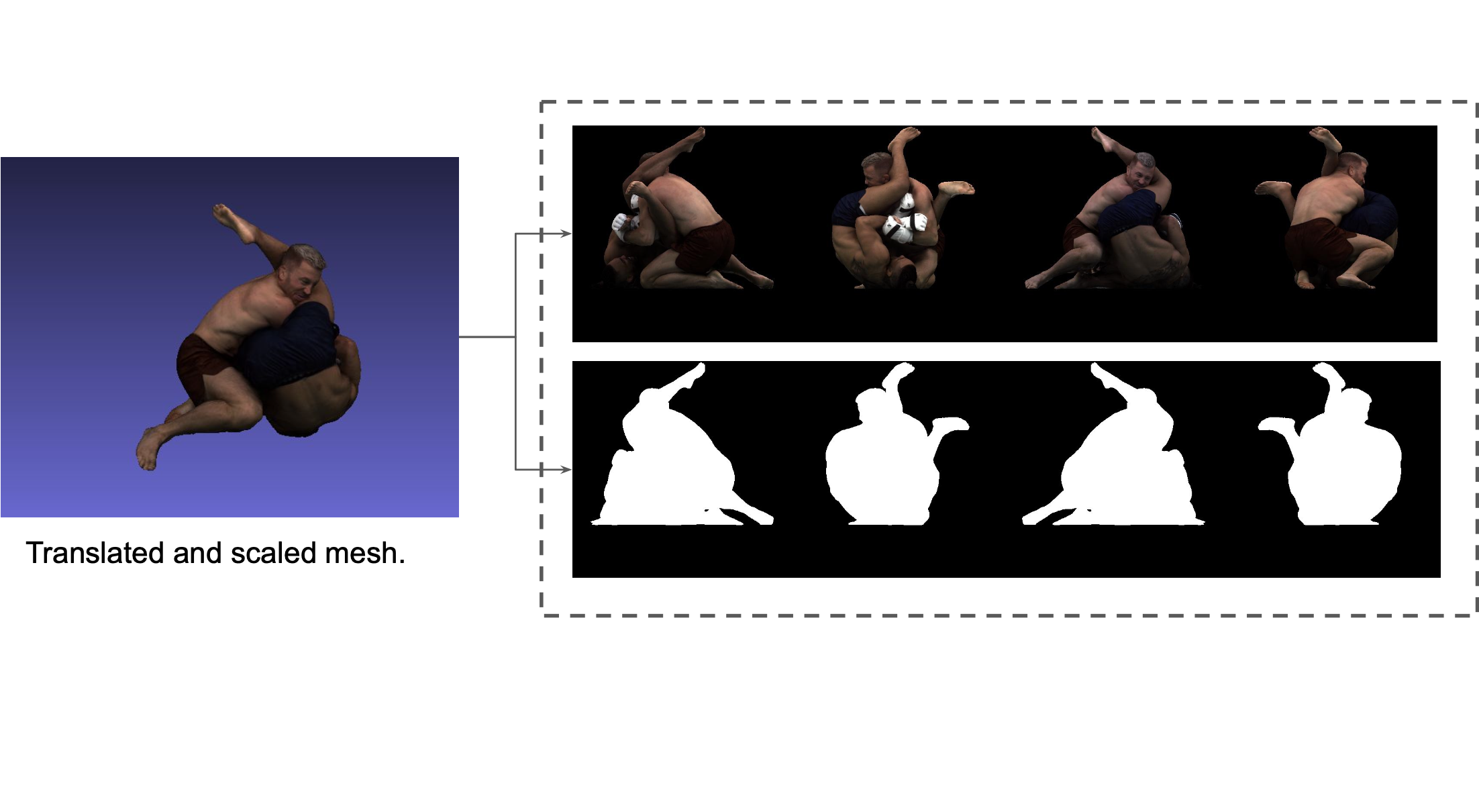
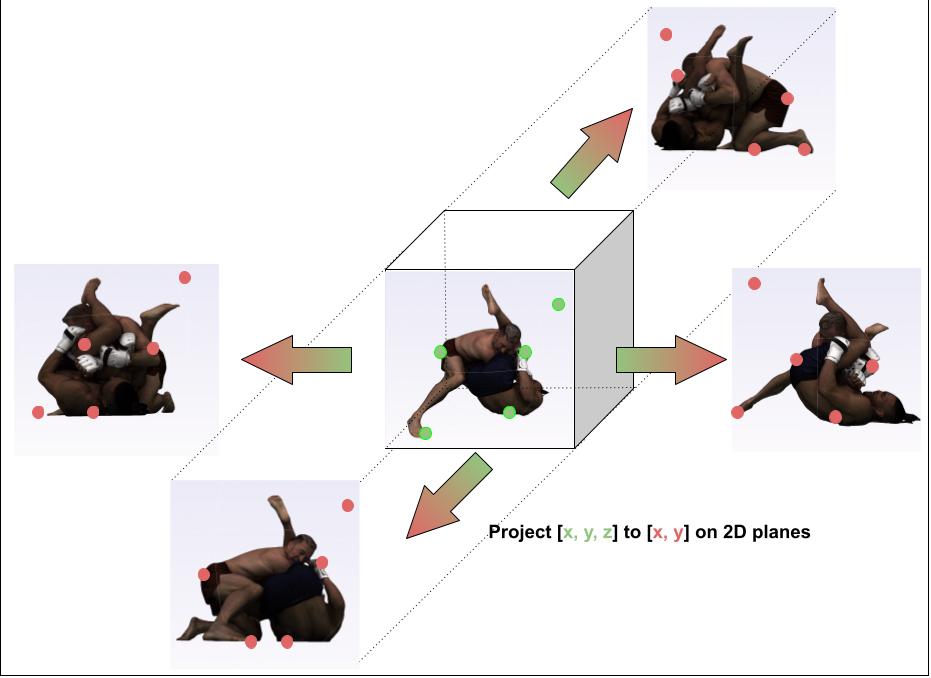
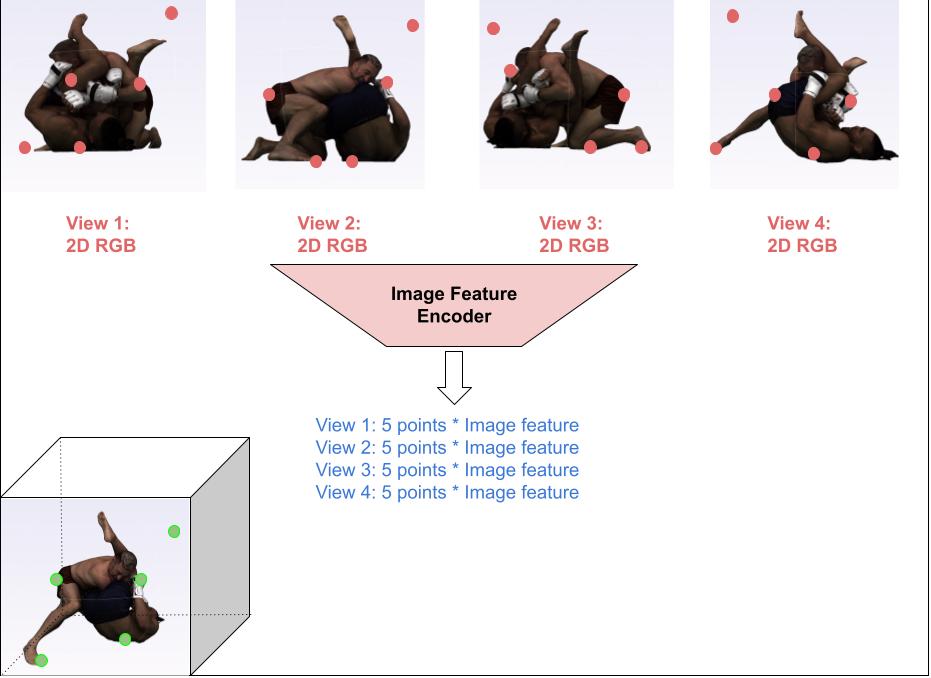
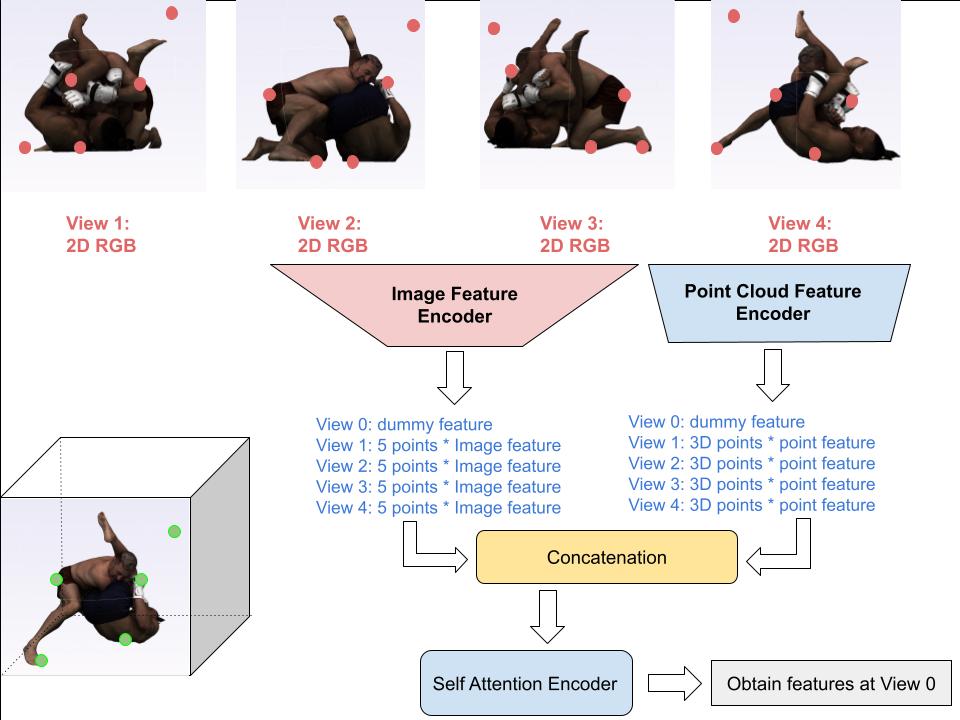
Method
The following diagrams illustrate the geometry branch of our model.

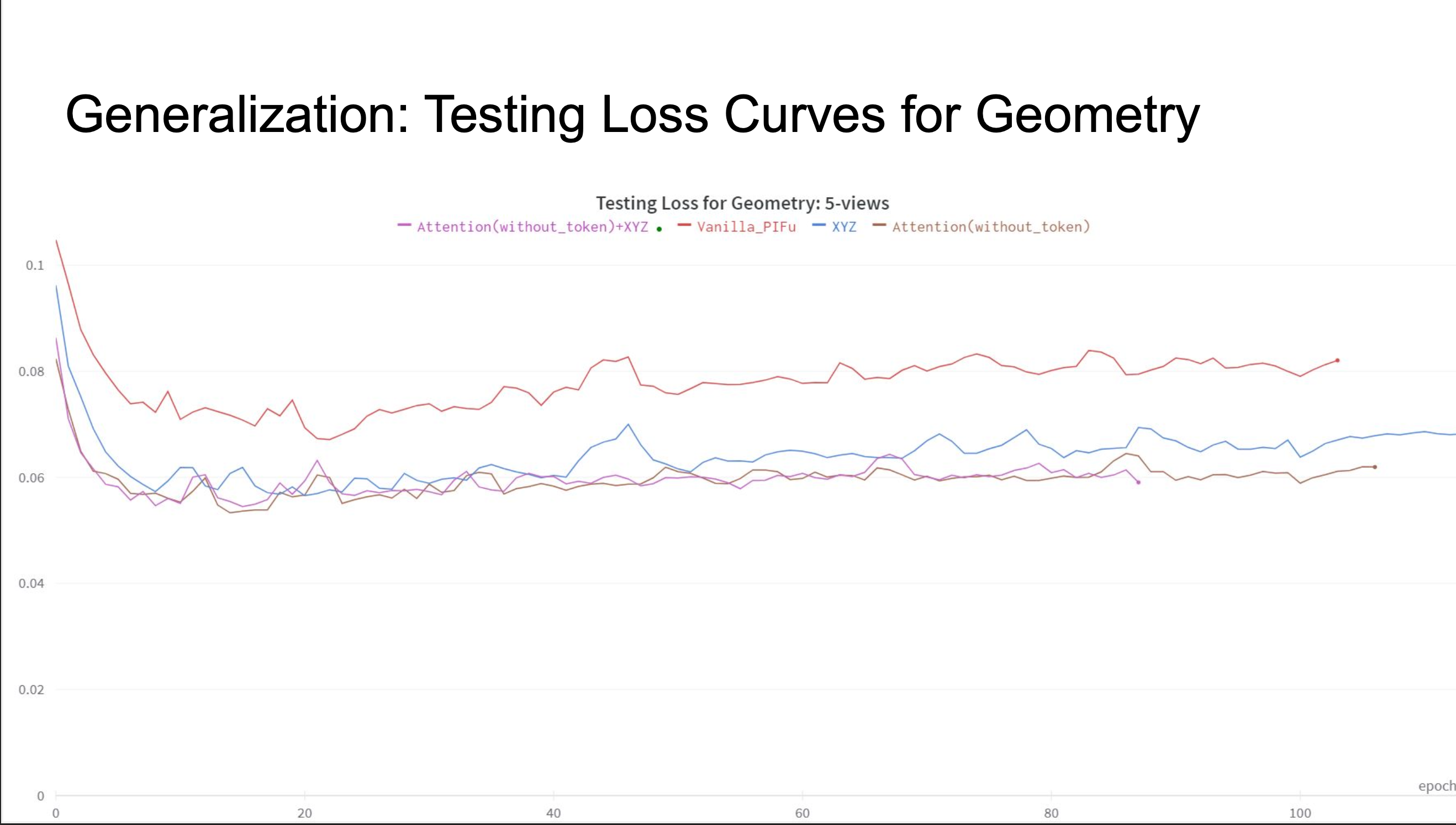
Experiments