What is Normalizing Flows?
One type of generative models is flow-based models, which explicitly learns the mapping between a group of samples \( x_{1}, x_{2}, ..., x_{n} \) to their latent distribution \( p(x) \).
Normalizing flows is one example of flow-based models.
Why Normalizing Flows?
Given some real-world data samples, we are always interested in learning their underlying distributions. Knowing the exact data distribution \( p(x) \) is helpful in some scenarios such as sampling data and identifying bias.
Objective
To minimize some notion of distance between \( p_{D} \) and \( p_{M} \):
\[ \theta^{*} = \underset{\theta \in M}{\mathrm{argmin}} \space dist(p_{\theta}, p_{D}) \]
\[ \theta^{*} = \underset{\theta \in M}{\mathrm{argmin}} \space E_{x \sim p_{D}} [-\log \space p_{\theta}(x)] \]
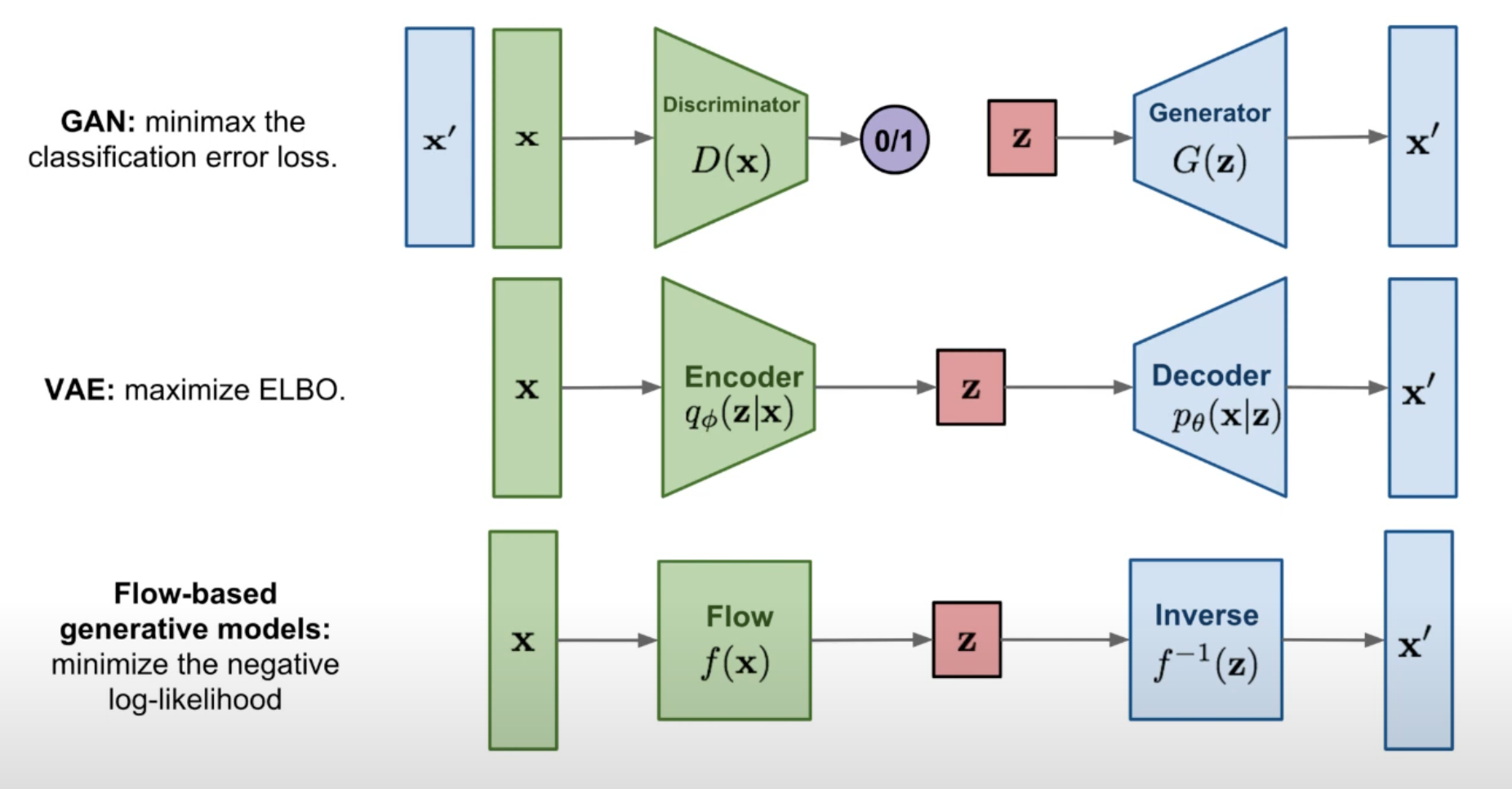
Flow-based models are different from GAN or VAE since flow-based models explicitly learn \( p(x) \) by optimizing the log-likelihood.
In GAN, the probability density function estimation is implicit by having the minmax classification error. We don't explicitly assign a probability density function and estimate it.
In VAE, we get an approximate probability density function by optimizing the evidence lower bound (which is \( p_{\theta}(x|z) \)). The encoder captures the approximate posterior mapping between \( x \) and \( z \), which is \( q \) parameterized by \( \phi \). The decoder captures \( p_{\theta}(x|z) \), which is parameterized by \( \theta \). In this case, it is an approximate density estimation.
In short, both GAN and VAE do not explicitly learn the probability density function of real data \( p(x) \).
In flow-based models, given an \( x \), we want to find the function \( f \) to get the latent representation \( z \). And if we invert \( f \), we will get \( x \) back. The functions \( f(x) \) and \( f^{-1}(x) \) are exactly the inverse. The flow-based models try to capture \( f \).
How Does It Work?
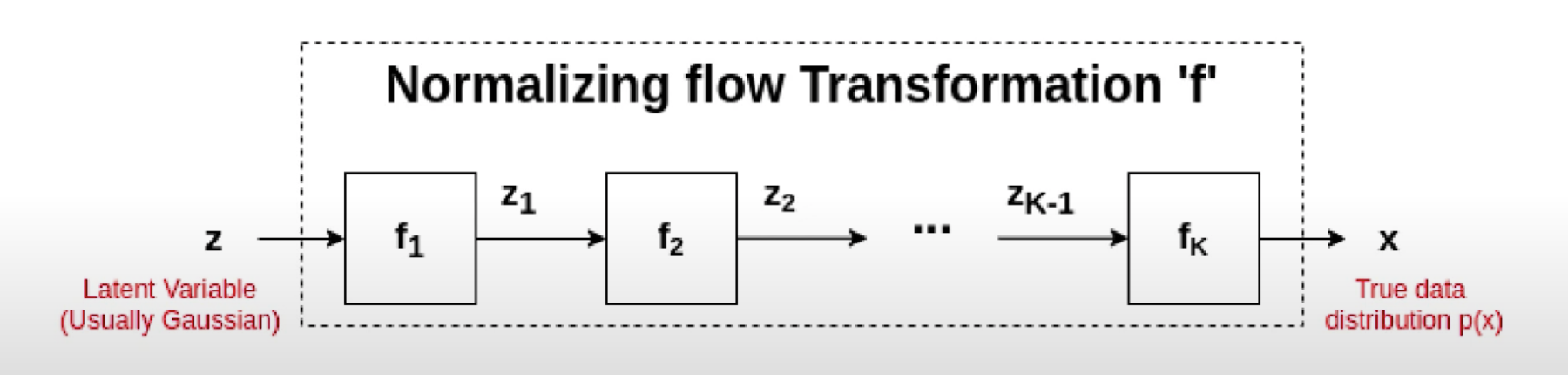
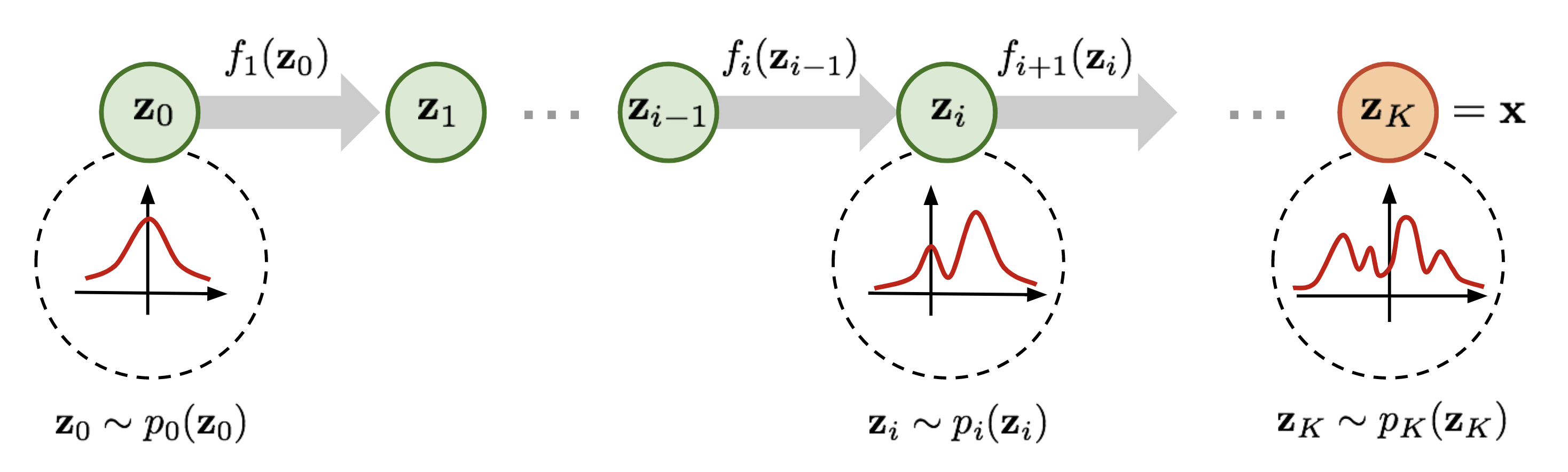
We try to identify a transformation \( f: Z \rightarrow X \) where \( f \) is a series of differentiable and invertible functions (\( f_{1}, f_{2}, ..., f_{K} \)).
In general, for any invertible function \( f: Z \rightarrow X \), the probability function is below. The detailed steps can be found in this page:
\[ p(x') = \pi(z') \mid \det(J_{f^{-1}}) \mid \]
\[ \log \space p(x') = \log \space \pi(z') + \sum^{K}_{i=1} \log \mid \det(J_{f^{-1}}) \mid \]
Intuition
- The first term describes the transformation \( f \) moulds the density \( p_{Z}(z) \) into \( p_{X}(x) \).
- The second term describes the relative change of volume around \( z \).
In summary, the three requirements must hold for a normalizing flow model:
- Transformation function \( f \) should be differentiable.
- Transformation function \( f \) should be invertible.
- Determinant of Jacobian should be easy to compute.
Example 1: NICE (Non-linear Independent Components Estimation)
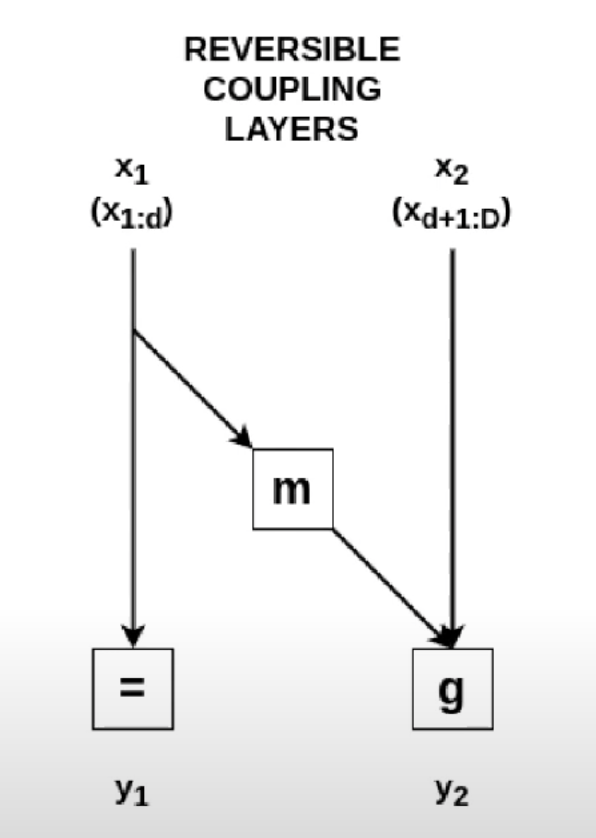
Coupling layer operation:
\[ y_{1} = x_{1} \]
\[ y_{2} = g(x_{2}; m(x_{1})) \]
Therefore, its Jacobian is a lower-triangular matrix, and the determinant is the product of diagonal elements:
\[ \frac{\partial y}{\partial x} = \begin{bmatrix} I & 0 \\ \frac{\partial y_{2}}{\partial x_{1}} & \frac{\partial y_{2}}{\partial x_{2}} \end{bmatrix} \]
The inverse mappings are:
\[ x_{1} = y_{1} \]
\[ x_{2} = g^{-1}(y_{2}, m(y_{1})) \]
Example 2: Real NVP (Real-valued Non-Volume Preserving)
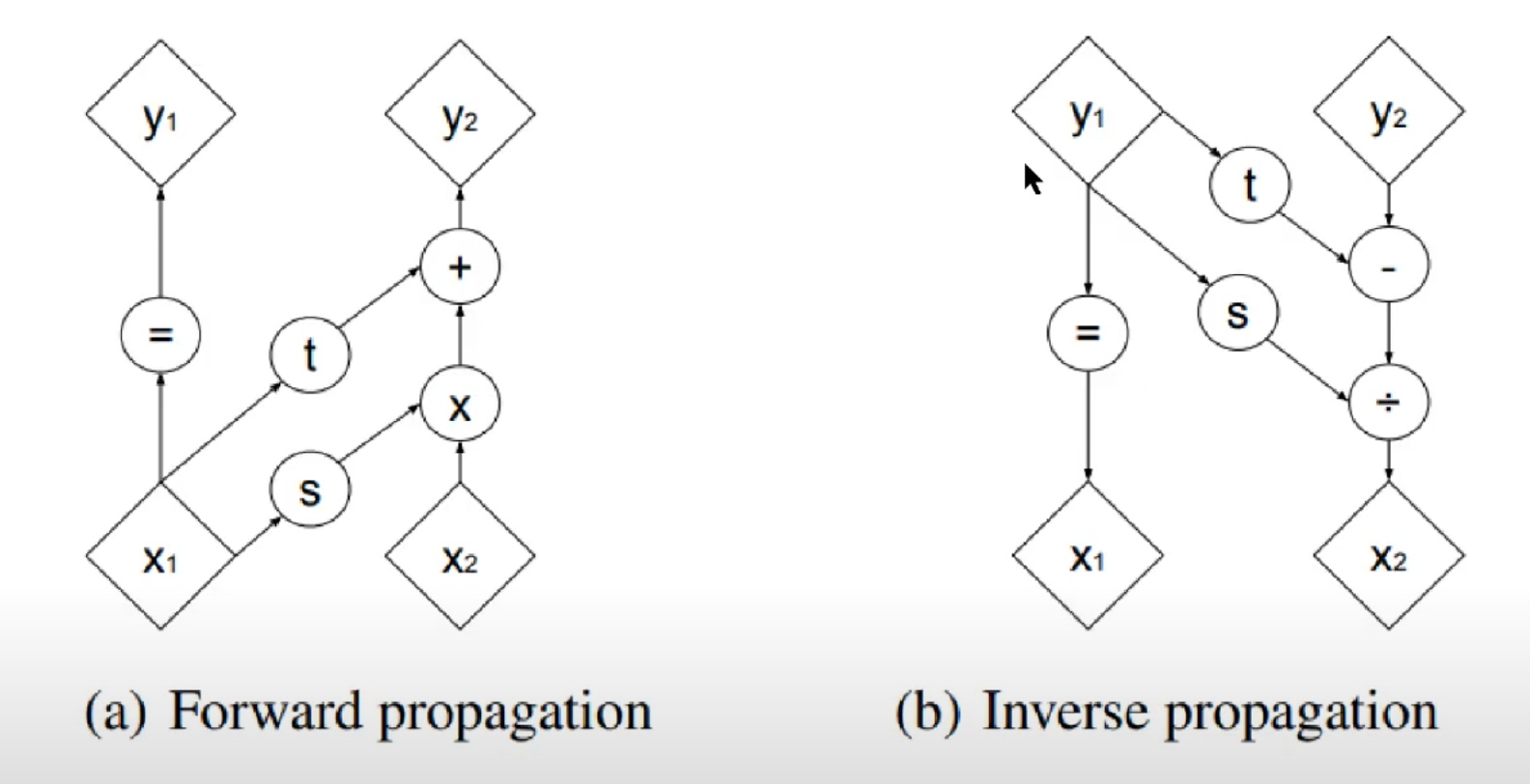
Affine coupling operations are (there is one translation component and one scale component for \( y_{2} \)):
\[ y_{1} = x_{1} \]
\[ y_{2} = x_{2} \odot \exp(s(x_{1})) + t(x_{1}) \]
The Jacobian becomes:
\[ \frac{\partial y}{\partial x} = \begin{bmatrix} I_{d} & 0 \\ \frac{\partial y_{2}}{\partial x_{1}} & \text{diag}(\exp[s(x_{1})]) \end{bmatrix} \]
Since the Jacobian matrix is not always equal to 1, affine coupling is not always volume-preserving, which is more realistic in real-world data.
The inverse operations are:
\[ x_{1} = y_{1} \]
\[ x_{2} = (y_{2} - t(y_{1})) \odot \exp(-s(y_{1})) \]