Here is some pre-requisite knowledge required before we move to Normalizing Flows.
1. Jacobian Matrix
Jacobian is a just matrix containing all partial derivatives between each input and output. It looks scary, but in fact, it is just a fancy name for a partial derivative matrix.
For example, if
\[ z = \begin{bmatrix} z_{1} \\ z_{2} \end{bmatrix} \]
\[ x = \begin{bmatrix} x_{1} \\ x_{2} \end{bmatrix} \]
and
\[ z = f(x) \]
\[ x = f^{-1}(z) \]
then,
\[ J_{f} = \begin{bmatrix} \frac{\partial x_{1}}{\partial z_{1}} & \frac{\partial x_{1}}{\partial z_{2}} \\ \frac{\partial x_{2}}{\partial z_{1}} & \frac{\partial x_{2}}{\partial z_{2}} \end{bmatrix} \]
\[ J_{f^{-1}} = \begin{bmatrix} \frac{\partial z_{1}}{\partial x_{1}} & \frac{\partial z_{1}}{\partial x_{2}} \\ \frac{\partial z_{2}}{\partial x_{1}} & \frac{\partial z_{2}}{\partial x_{2}} \end{bmatrix} \]
\[ J_{f} J_{f^{-1}} = I \]
2. Determinant
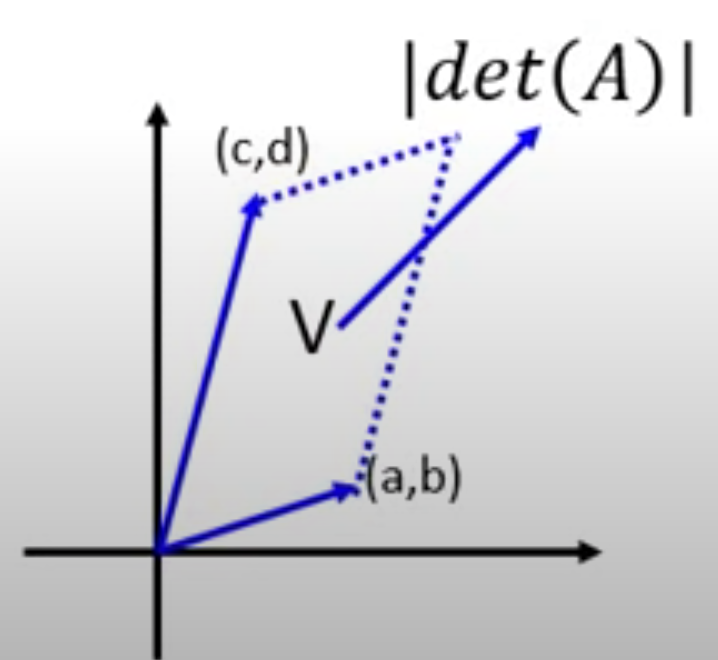
Determinant is a scalar value, which describes the area/volume enclosed by all the vectors in a matrix.
For example, if
\[ A = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \]
then,
\[ det(A) = ad - bc \]
The most important thing is that:
\[ det(A) = \frac{1}{det(A^{-1})} \]
\[ det(J_{f}) = \frac{1}{det(J_{f^{-1})}} \]
In a 2D space, it looks like this:
3. Change of Variable Theorem
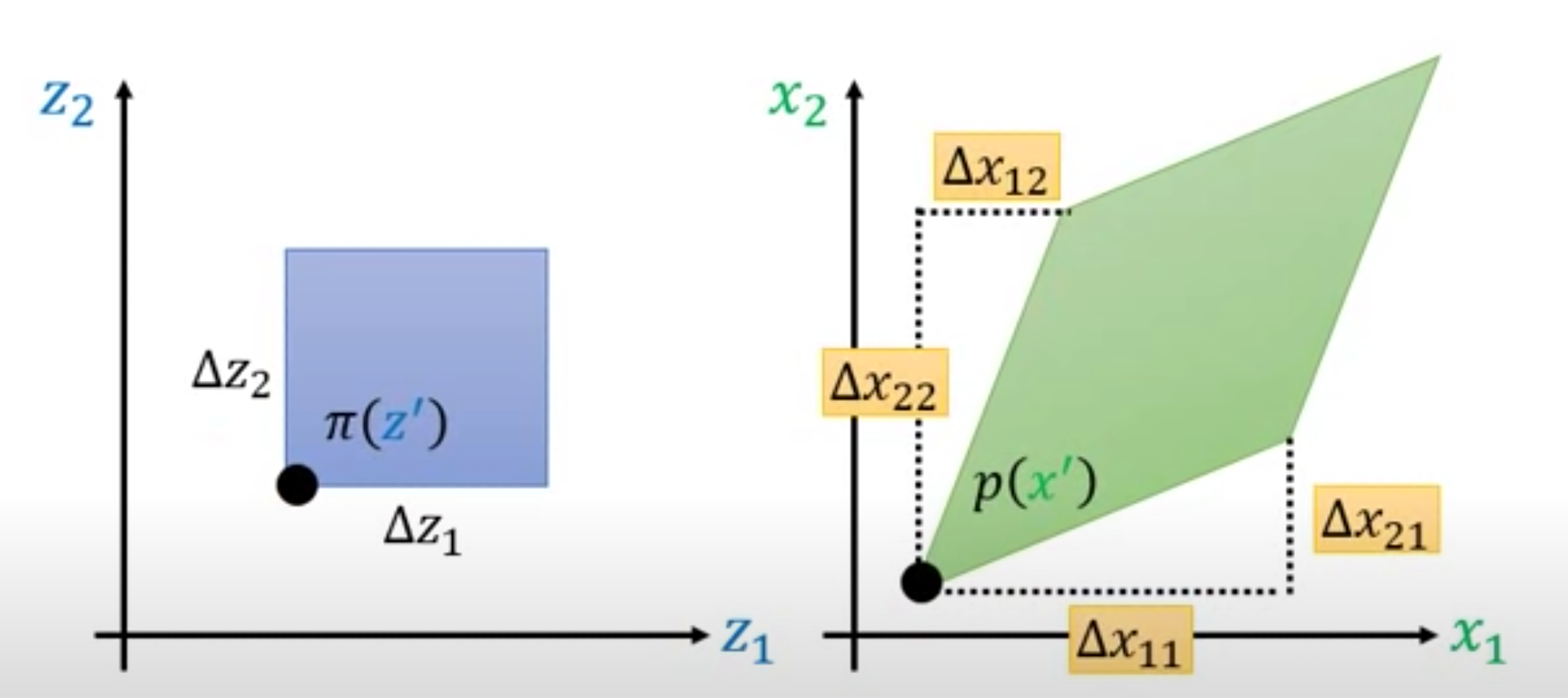
\[ p(x') \mid det \begin{bmatrix} \Delta x_{11} & \Delta x_{21} \\ \Delta x_{12} & \Delta x_{22} \end{bmatrix} \mid = \pi(z') \Delta {z_{1}} \Delta {z_{2}} \]
and this becomes to
\[ p(x') \mid det(J_{f}) \mid = \pi(z') \]
\[ p(x') = \pi(z') \mid det(J_{f^{-1})} \mid \]